The countdown has begun for robots to perform production line operations in real-world, complex environments.
“AWE 3.0 empowers ItStone’s A1 robot to claim the first Guinness World Record for embodied intelligence in industrial precision manipulation!” At the launch event for “ItStone ZhiHang Embodied General Large Model AWE 3.0 and Data Solution SenseHub,” Dr. Ding Wenchao, Chief Scientist at ItStone ZhiHang, delivered a keynote speech and officially unveiled the world’s first general-purpose embodied large model capable of practical work: AWE 3.0. This is the industry’s first large model to undergo a Turing test for flexible manipulation, comprehensively endowing robots with tangible industrial capabilities and enabling them to truly handle tasks in complex physical worlds.

I read the press release with a raised eyebrow. Lab demos rarely survive contact with actual factory floors. Unit economics matter more than Guinness records. We need to see uptime, not just precision.
AWE 3.0: Comprehensive Upgrade of Five Core Capabilities, Building a “Valuable” Large Model
The globally first general-purpose embodied large model capable of practical work, AWE 3.0, released by ItStone today, has achieved breakthroughs in cross-scenario migration and generalization, as well as performance improvements in fluent millimeter-level precision manipulation, flexible object perception and control, and stable execution of long-horizon tasks. Its core capabilities are defined by “stepping out of the lab, landing in real-world applications, and achieving universal generalization.”

AWE 3.0 combines two mature capability enhancements with three hard-core technological breakthroughs. It retains core advantages such as whole-body end-to-end learning and dynamic spatio-temporal reasoning, while leveraging ItStone’s newly self-developed Omni-Sense Decision (OSD) to eliminate viewpoint dependency. This allows robots to increase task success rates by three times in unseen viewpoints, ensuring stable and reliable operations in complex, changing real-world environments. Relying on the WIYH dataset—which boasts over one million hours of data scale—and rich tactile data, AWE 3.0 utilizes High-Density Tactile Sensing (HTS) to make robotic tactile perception more acute. This enables millimeter-level fine-grained responses and significantly enhances generalization capabilities. Additionally, through Latent Action Smoothing (LAS), AWE 3.0 ensures smooth task execution, reducing jitter by over 45% and largely eliminating stuttering. This allows robots to handle professional scenarios such as precision assembly and flexible manufacturing.
In short, the emergence of AWE 3.0 has laid a solid technological foundation for the large-scale implementation of embodied intelligence across various industries.
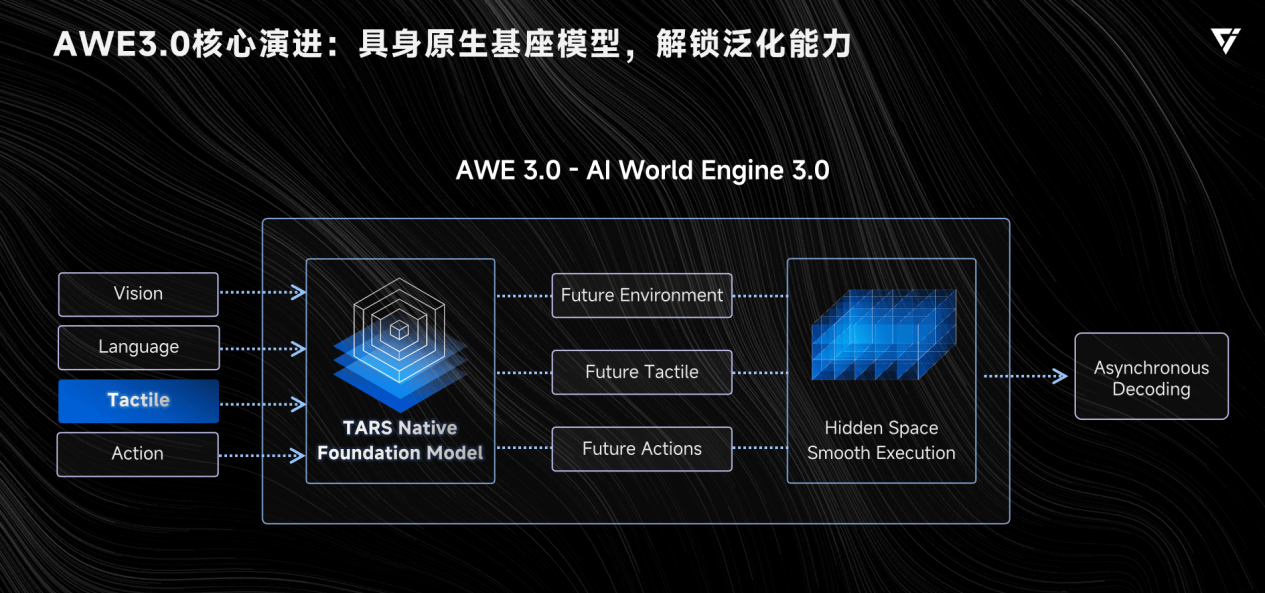
Omni-Sense Decision (OSD): Adapting Calmly to Unseen Scenarios
Traditional robots rely solely on known, fixed viewpoints of their own bodies. Once the environment changes, they struggle to execute tasks stably—a long-standing industry bottleneck that AWE 3.0 has broken through. ItStone’s AWE 3.0 subversively achieves autonomous decision-making based on world states via Omni-Sense Decision (OSD). Even when facing new viewpoints not encountered during training, it can generate stable operational strategies through reasoning. According to experimental data, OSD improves robot task performance in unseen viewpoints by up to three times, significantly enhancing generalization capabilities in real-world environments. This hard-core strength ensures stable and reliable operations in complex, changing real-world settings, providing robust support for the steady operation of industrial production lines and the reliable execution of complex tasks.
High-Density Tactile Sensing (HTS): Micro-Level Perception, Millimeter Precision
In scenarios requiring high-precision contact and flexible manipulation, tactile perception and feedback are crucial for robots. Leveraging the WIYH dataset, which has accumulated over one million hours of data, along with rich collected tactile data, ItStone’s High-Density Tactile Sensing (HTS) technology enables AWE 3.0 to de
I read the release for Tashi Zhixang’s AWE 3.0, and what stood out was their pivot away from the current VLA hype toward something grounded in physical contact. They claim this model handles “contact-intensive” tasks like wire harness insertion with industrial-grade precision. It’s a bold move to bet on fine-grained manipulation rather than just high-level reasoning.
I think lab demos love smooth trajectories; factory floors care if the part breaks. In the field, millimeter precision is useless if the robot can’t handle a loose cable.

Smoothing the Jitter with Latent Action Logic
The core of AWE 3.0’s claim to stability is Latent Action Smoothing (LAS). The filing shows they reuse and optimize action latent variables within the latent space to create continuous transitions between frames. This isn’t just post-processing; it’s baked into how the model generates movement. The result? They report a reduction in trajectory jitter by over 45%.
This smoothness allows for millimeter-level fine-grained actions, which is critical for sensitive operations like assembly or wiping. More importantly, they claim the system can automatically recover from near-failure states. In my experience, recovery logic is where most embodied AI models fail when pushed beyond their training distribution. If AWE 3.0 truly handles long-horizon tasks without stuttering, it solves a major unit economics problem: downtime due to erratic behavior.
Reasoning Beyond “What” to “Why”
AWE 3.0 also introduces Dynamic Spatio-temporal Reasoning (DSR). This module aims to move beyond simple object detection into predictive reasoning about physical laws. The numbers here are specific: spatial description accuracy exceeds industry benchmarks by 21%, and inference speed is 2.21 times faster.
This speed allows for real-time “if… then…” hypothetical reasoning. When combined with Whole-Body End-to-End Learning (E2E-WBC), the robot integrates perception across its entire body structure. It’s not just seeing an object; it’s coordinating limbs to interact with it based on human data. This represents a shift from passive observation to active, stable execution.
What I watch for is faster inference is great until thermal throttling hits in a real cell. I think predictive reasoning helps, but only if the sensors feeding it are calibrated.
The Data Moat: Human-Centric Collection
Dr. Ding Wenchao’s launch statement drew a hard line against teleoperation and simulation data for VLA models. He called them “top-heavy and unusable in real-world complex environments.” Instead, ItStone is pushing Human-Centric data collection via their SenseHub suite.
This isn’t just about gathering videos; it’s about fusing multi-modal perception data with high-precision whole-body motion capture algorithms. SenseHub claims millimeter-level precision and low-latency real-time tracking of joint postures. The key differentiator they highlight is microsecond-level time synchronization between heterogeneous sensors—a known industry headache that often ruins dataset quality for downstream training.

ItStone positions itself as the only provider offering a one-stop data ground truth service, covering collection, automated labeling, and quality assessment. By controlling the hardware-software loop for data acquisition, they aim to ensure the “natural and authentic” human behavior data required to train these models isn’t corrupted by sync errors or low-fidelity tracking.
In the field, synchronized sensors are a nightmare to maintain in production environments. What I watch for is if the data is clean, the model might actually generalize beyond the demo stage.
The narrative here shifts from the sterile safety of simulation or the latency-prone nature of teleoperation toward a claim of industrial-grade autonomy. The company, ItStone ZhiHang (also referred to as Tashi Zhixang in some contexts), is positioning its new model not just as another vision-language-action (VLA) iteration, but as a “general-purpose embodied large model” designed for the messy reality of manufacturing and service environments.
From Record-Breaking Demos to Real-World Deployment
The announcement hinges on the AWE 3.0 model, which the company describes as achieving “comprehensive dimensional capability upgrades.” This is a significant pivot from previous iterations that relied heavily on simulated data or limited teleoperation datasets. The core claim is that this new architecture allows for true generalization across diverse, unstructured real-world scenarios without falling back on human-in-the-loop controls for every task.
I think simulations rarely capture the friction of actual factory floors. In the field, teleoperation hides the robot’s inability to handle novelty. What I watch for is general-purpose claims often collapse under specific edge cases.
Industrial-Grade Data Acquisition as the Differentiator
A critical component of this release is the emphasis on “industrial-grade Human-Centric data acquisition solutions.” This suggests a move away from purely synthetic or web-scraped datasets toward high-fidelity, physically grounded human demonstrations. The implication is that by capturing how humans actually interact with tools and environments in industrial settings, the model can learn more robust policies than those trained on idealized digital twins.
The Commercialization Pitch: Beyond the Guinness Record
The company explicitly states, “The Guinness World Record is just the starting point; more importantly, it is about helping robots break through more boundaries of capability.” This framing acknowledges that while breaking records (likely in dexterity or task completion speed) generates press, the real value proposition lies in commercial viability. They are positioning AWE 3.0 as the “embodied intelligent brain” ready for large-scale deployment, targeting sectors like manufacturing and services where reliability is paramount over novelty.
I think records don’t pay for maintenance or downtime. In the field, commercialization requires uptime, not just speed.
Comments
Sign in to join the discussion and leave a comment.
Sign in with Google